Обзор
Устанавливая инструмент в неизвестной точке и измеряя горизонтальные углы между тремя точками с известными координатами, можно вычислить координаты неизвестной точки. Данный процесс называется Обратной засечкой. Если вертикальные углы к известным пунктам также измерены, может быть произведен расчет Z неизвестной точки.
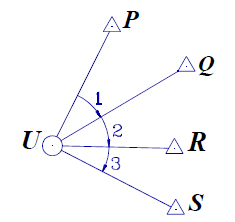
На рисунке ниже U - это неизвестная точка, а P, Q, R и S - известные точки. Если известны 3 точки (например, P, Q и R), то для точки U существует уникальное решение.
Если известно более трех точек, то данные являются слишком обширными и необходимы дополнительные настройки.
Наиболее используемый метод расчета - это метод наименьших квадратов. Как вариант, вы можете рассчитать несколько уникальных значений, а затем усреднить их.
В примере выше показано, координаты точки U будут рассчитаны три раза, используя измерения PQR, затем PQS и наконец, QRS.
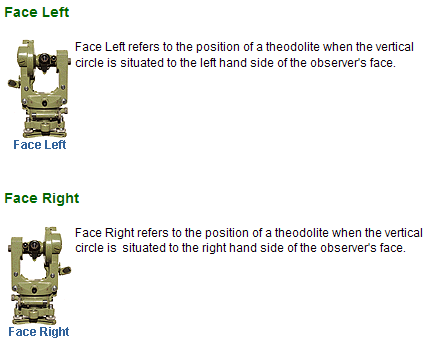
Несмотря на то, в расчетах обратной засечки используются углы между известными точками, полевыми измерениями являются сведения о горизонтальных углах по направлению к фиксированным опорным точкам. Чаще всего стандартным является использование измерений как СЛЕВА, так и СПРАВА (СЛЕВА можно перевести в СПРАВА, повернув инструмент вокруг оси на 180 градусов).
Для улучшения процесса съемки возможно получение нескольких "кругов", то есть съемок слева и справа для всех пунктов.
Обычно теодолит поворачивают для каждого круга. Это означает, что значение горизонтального угла для каждого пункта будет отличаться в каждом круге.